Earlier in the semester the class was able to learn the basics of Unmanned Aerial Systems (UAS) and experiment with operating these devices on a computer simulator. During this exercise we were able to learn and observe what the pre-flight protocols, mission planning, and actual flights consisted of. It is very, very important to be prepared and plan before going into the field to collect data. This exercise included flying two different UAS platforms: the IRIS (Fig 1) and a Matrix (Fig 2).

Figure 1. The IRIS platform flown during the exercise.

Figure 2. The Matrix platform flown during the exercise.
Study Area
The study area for this exercise was once again the Priory (Fig 3). The Priory allowed wide-open spaces with a low volume of people or tall objects.
The weather consisted of:
*Temperature: 52 degrees Fahrenheit
*Cloud Cover: Cloudy, Stratus
*Wind: 6-8mph S-SE; Gusty

Figure 3. The UWEC Priory. This was the study area for the given exercise.
Mission Planning
One important aspect of flying UAS platforms is to create a Flight Mission. The Flight Mission communicates from the base station (either a computer (Fig. 4) or tablet (Fig. 5)) to the platform. Along with being connected to satellites and GPS, the base station controls the platforms movements if set on autopilot. This autopilot can be overridden at anytime by the Pilot. There are various base stations that can be used and each have their pros and cons. By using a computer, a person has more options and abilities to create more complex missions, but a computer is also very bulky and large. A tablet is light and easily to be carried, but has less options associated with it. There are two ways in which a mission can be created. Either the manual plotting of points can be made over the given area or the computer can plot the points. By drawing a polygon shape over the AOI, the program will automatically (Fig 4). The specs of the senor or camera will depend on the number of points needed. The point mark areas the unit will turn or change direction.

Figure 4. The base station with the mission polygons drawn over the AOI.

Figure 5. Example of a tablet used when flying UAS units.
Pre-Flight
One of the most important parts of flying a UAS platform is preforming a pre-flight checklist (Fig 6; Fig 8). By creating a checklist, like the one below, it ensures both a successful flight and that it is safely done. Safety of yourself and others is extremely important when flying a UAS platform. If something would not be fully connected, the unit could descend and cause injury, but also it could destroy the unit and sensor itself.
Safety is most definitely important, but so is a successful flight. If the sensor is not properly connected or the mission is not properly set up then it cause no data to be collected. This is a waste of time and money. By double checking oneself issues like this can be avoided.

Figure 6. Preforming the pre-flight checklist.
Pre-Flight Checklist (Fig 7)
1. Check Weather Conditions and Record
On Platform
2. Check Electrical Connections
3. Check Frame Connections
4. Check Motor Connections
5. Props Secure?
6. Props not cracked or chipped
7. Battery Secure?
8. Antenna Secure?
9. Sensor Connected?
Power Up Sequence
10. Green Light on Platform? (Indicates connected to Satellites/GPS)
11. Connect to Platform from Base Station
12. Batteries over 95%?
13. Transmitter on? Batteries charged?
14. Record number of available satellites
15. Mission Created?
16. Mission Secure? Area Clear?
17. Mission Sent?
18. Sensors on? At ready?
Take off Sequence
19. Throttle down?
20. Platform on
21. Spectators clear?
22. Kill switch off?
23. Clear for Launch
24. Activate Auto-pilot

Figure 8. Example of the pre-flight checklist on the base computer. It is important to recorded information like this to prevent failure and issues in the future.
Flights
Once the Flight Mission and Pre-Fight checklist have been completed, it is time to flight. By continuing with the checklist, the power-up and flight sequences can be followed (Fig 7). One of the most important concepts of flying is COMMUNICATION! The Pilot in Command and Unit Pilot must always be communicating. Once the unit is launched, variables like the number of satellites, if the platform is on coarse, and where is the platform located must always be watched. If something goes wrong, the Pilot in Command can abort the mission and the platform will automatically land itself (autopilot) or it can be manually landed. Just because the unit is on autopilot, it is extremely important to keep your eyes on it at all times incase an issue would occur.
Once a mission has been completed, it is important to fill out a Post Mission Log. By doing so, this is a place that issues and problems can be recorded to used for reference in the future. Things that would have gone into our log would have been the battery issues that included dead batteries, but also not to interchange batteries between controllers.
Pictures of the flights:


Data
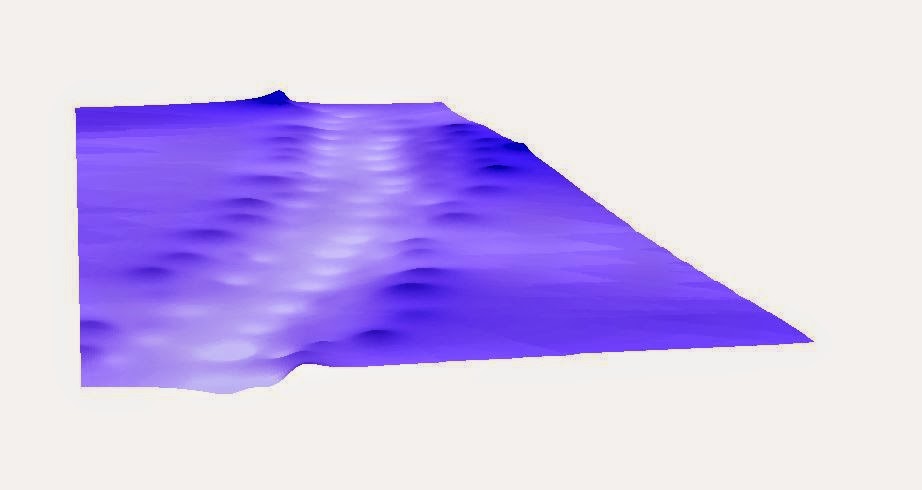
Once the flight has been successfully flown, the data can be downloaded and processed through the software. With advancements in software, data can now be precessed right in the field. This has major advantages since a person can make sure the collection process was a success and all areas were covered. The software can process the image tiles into different photographs like RBG and IR.
Examples of the mosacis made in the field from the flight of the Matrix platform:



Final Remarks
This was an extremely educational and awesome experience. UAS units and technology are definitely the frontier of Geospatial Technology. I hope in the future that I will be able to learn more able this technology and utilize it in my research.