Unmanned Aerial Systems (UAS) are the up and coming future of geospatial technology. An UAS is a remotely controlled aerial vehicle. They can be used for a variety uses including remote sensing, aerial surveillance, and land surveying. With the ability to carry multiple kinds of cameras and sensors, the number of uses is countless and continues to grow. Types of sensors include biological, chemical, and electromagnetic spectrum sensors. These sensors can take aerial imagery, monitor air control, and even detect microorganisms.
In this lab, we were to spend two hours on RealFlight 7.5. RealFlight is a simulator program for UAS aircraft. These aircraft range from the most simple to the most complex systems. It also allows you to change environmental factors like weather and different locations and scenarios to fly. The second part was to then research the uses of different aircrafts and sensors, and then respond to given scenarios.
Flight Simulator
During the use of the RealFlight 7.5 simulator, we were to use four different aircraft over the two hour period (approximately a half hour on each). During this flight time, we were not only to learn to fly the aircraft, but also change environmental factors to challenge ourselves.
Over the two hours of simulation time, I flew four different aircraft that included a Slinger, Quadcopter, Octocopter, and a Mitsubishi Plane. Starting with the most basic, the Slinger was a good way to get used to the controls and different camera views. A Slinger is one of the cheapest and most basic of UAS aircraft (Fig 1). They are most commonly made of a Styrofoam material and come in a variety of shapes and sizes. One of the most difficult things to learn about the Slinger was proper take off technique and keeping it level while flying.

Figure 1. Example of the Slinger aircraft used during simulation.
A Quadcopter is the next step up in UAS aircraft (Fig 2). Driven by four propellers, this aircraft is easily flyable and can hold more weight then more basic models. The Quadcopter is easily flyable on take off, but is more difficult to keep steady and on a straight path in the air. It is also easily landed with the downward arms as support.

Figure 2. Example of the Quadcopter aircraft used during simulation.
The Octocopter is very similar to the Quadcopter with being a multi-rotor aircraft, but has eight propellers for maximum lifting power (Fig 3). Although a aircraft like this can lift more weight, it also has a downfall of less battery life with more propellers to run. This aircraft seemed to be more steady in the air then the Quadcopter.

Figure 3. Example of the Octocopter aircraft used during simulation.
The last aircraft used during simulation was a Mitsubishi plane. I choose this aircraft to see the differences in the Slinger vs. a plane model. I found aircraft like these were more easy to fly then the multi-rotor since you could fly a straight path. I would say aircraft like these are better for larger areas, whereas multi-rotor would be better suited for smaller areas. 
Figure 4. Example of the Mitsubishi plane aircraft used during simulation.
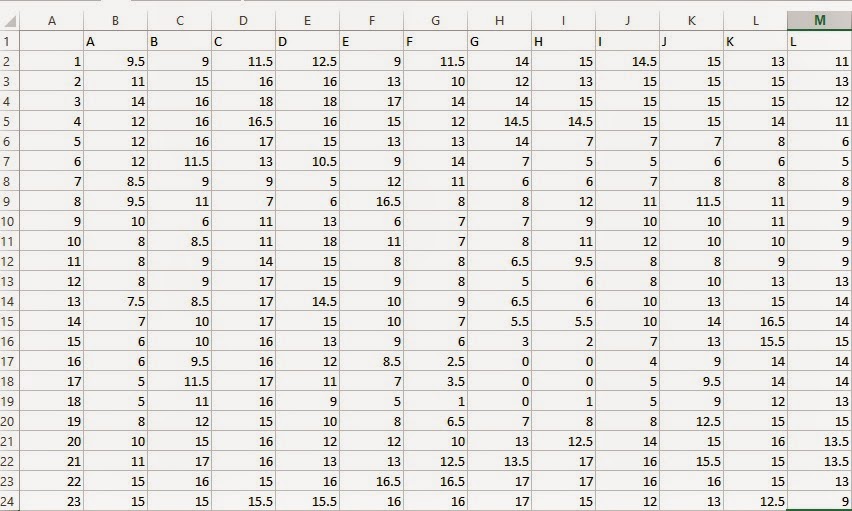
All flight conditions and results were logged (Fig 5). This is a good way to record flight time along with any difficulties and reasons for future missions. Unmanned Aerial Systems can save companies and departments money, but also can cost if not properly used or the pilot has minimal experience.

Figure 5. Flight log of simulator aircraft, time, conditions, and result of flight.
Scenarios
1) An oil pipeline running through the Niger River delta is showing some signs of leaking. This is impacting both agriculture and loss of revenue to the company.
A multi-rotor UAS is going to be most effective at maneuvering around the Niger River delta. The multi-rotor UAS has ability to move in all directions and will allow for the most land to be covered in a short period of time. One of the draw backs to using the rotary UAS is that it has a very short battery life. Some potential sensors would include a UV Sensor to detect the oil and vegetation or a Near-IR (NIR) would also be able to do the same.
2) A military testing range is having problems engaging in conducting its training exercises due to the presence of desert tortoises. They currently spend millions of dollars doing ground based surveys to find their burrows. They want to know if you, as the geographer can find a better solution with UAS.
An option that would be effective at solving the desert tortoise problem in the most effective and inexpensive way would be to use a Slinger (fixed wing) UAS. The Slinger would be the best UAS for this particular job because it has the longest flight time and range. It is best for aerial mapping and making terrain modeling of large area. An UAS that is able to cover large distances will be best for this job. Some possible sensors would include a TIR or TAR, since they are best at looking at surface temperatures, which are important with Tortoises.